欢迎光临~湖南智能应用科技有限公司-hniat.com
语言选择:
 ∷
∷

∷
 ∷
∷
在不久前(6月19日)结束的CVPR(全球计算机视觉及模式识别领域顶级学术会议)2019上,百度Apollo公布了一套自动驾驶纯视觉城市道路闭环解决方案——百度Apollo Lite。
据Apollo技术委员会主席王亮介绍,Apollo Lite是目前国内唯一的城市道路L4级视觉感知解决方案,能够支持对10路摄像头、200帧/秒数据量的并行处理,单视觉链路最高丢帧率能够控制在5‰以下,实现全方位360°实时环境感知,前向障碍物的稳定检测视距达到240米。
百度Apollo的这一成果的发布,特斯拉应该会很高兴。
在自动驾驶研究领域,只有特斯拉一家是纯视觉方案的坚定支持者,今年4月份的“自动驾驶日”上,马斯克还曾公开嘲笑“使用激光雷达做自动驾驶的人都是傻X”,几乎得罪了所有同行。
如今,百度用实际行动表示对纯视觉感知方案的支持,特斯拉心里或许暖暖的:我不再孤军奋战了。
所谓的激光雷达派和纯视觉感知派,是自动驾驶车辆对外界环境感知两种不同的技术取向。根据自动驾驶的基本原理,首先由各类硬件传感器组成感知层,用来捕捉车辆位置信息和外部环境信息,然后再进入到决策和执行。
围绕着自动加上感知硬件的取舍,就形成了纯视觉派和激光雷达派。长期以来,Mobileye、特斯拉等坚持第一性原理的公司认为,只要用摄像头就够了,但多数公司则认为,激光雷达是必不可少的。
值得注意的是,从2018年以来,Mobileye也开始“修正”自己感知技术的路线,在测试车辆中加上了激光雷达,甚至,Mobileye还打算亲自上阵做激光雷达。目前,在自动驾驶技术主流公司中,只有特斯拉一家还在坚持着纯视觉方案。
激光雷达虽然探测距离和准确性都大大高于摄像头,但不能识别颜色,无法完成追踪目标的任务;同时在高速移动中处理的信号越多,海量像素会对广电探测器带来干扰,造成识别精度的下降,以及要额外插入外部适配器单独充电,使用比较繁琐。
纯视觉方案的优势在于,由摄像头获取的视频数据与人眼感知的真实世界最为相似,也最接近人类驾驶的形态,同时高分辨率高帧率的成像技术发展趋势意味着图像内蕴含的环境信息更加丰富,但摄像头依赖环境光照,容易受到恶劣环境影响,而且无法直观判断景深,对算法、算力的要求都很高。
现阶段,激光雷达的感知能力是强于摄像头的,这也导致为了加快自动驾驶商业落地的速度,科技公司和车企们走“捷径”,在方案中过分依赖和堆砌激光雷达,而回避了视觉识别算法、芯片等自动驾驶的基本问题,用特斯拉AI高级总监Andrej Karparthy的话来说,就是“给人一种虚假的‘技术进步了’的感觉”。
特斯拉力挺纯视觉方案其中很大一个原因在于激光雷达实在太贵了。Waymo在它的测试车上最早使用Velodyne的激光雷达,单个售价达7.5万美元,这样的成本很难通过用户消化。而特斯拉毕竟是一家面向C端销售新能源汽车的企业,而不是一家出售自动驾驶技术和解决方案的公司。从技术长远的发展趋势来看,纯视觉方案或许无法走完自动驾驶的全程,但纯视觉方案的核心硬件摄像头及其视觉算法一定是今后自动驾驶感知技术的核心。特斯拉站队低成本的纯视觉方案,既是为当前的销售,也是押注未来的趋势。
此次百度发布纯视觉方案,是单纯的技术能力展示,还是被马斯克“洗脑”了,决定与特斯拉组成“同盟”,站队纯视觉方案阵营?智能相对论认为,百度的行动或可从以下几个方面进行解读。
1、打磨自己的视觉技术
上文提到,无论自动驾驶技术如何发展,摄像头为核心的硬件及算法都将是未来自动驾驶感知技术的核心。百度作为全球自动驾驶研究排名靠前的科技公司,提前布局相关技术非常必要。
百度Apollo技术委员会主席王亮强调,百度下决心投入资源研发纯视觉感知解决方案并不意味着放弃现有基于激光雷达的技术路线,而是在技术实践过程中充分意识到无人驾驶系统true redundancy的必要性,决定通过压强环视视觉技术来夯实多传感器融合感知框架。
将王亮的话说得通俗一点,就是在传统以激光雷达为主,视觉为辅的感知解决方案中,视觉感知的自身问题和缺陷在激光雷达的优势掩盖下暴露得不够充分,因而需要通过纯视觉方案来打磨技术,提升无人驾驶系统的鲁棒性和安全性。
2、低成本进入ADAS市场
百度推出纯视觉方案的这个时间节点也意味颇深。众所周知,实现真正意义上的自动驾驶并没有确切的时间表,现在汽车行业整体都处于L2级向L3级或者L4跨越的过程中,因而从中产生了大量的ADAS(先进驾驶辅助系统:Advanced Driver Assistance System)需求。
根据相关统计显示,2017年国内ADAS市场规模约为421亿元;预计2020年,国内ADAS市场规模将有望超过800亿元。Qyresearch预测到2023年,国内的ADAS市场规模将达到1200亿元。其中前装市场规模约为950亿元,后装市场约为250亿元。
很显然,ADAS是一个体量庞大、内涵丰富的市场,是实现自动驾驶的必经之路。那么在实现自动驾驶之前,在路上“淘点金”也无可厚非。
百度用低成本的视觉方案降级进入到ADAS市场,不光可以开发出更多应用场景,还能提升ADAS产品能力,竞争力明显。这套纯视觉方案也可看成是百度的“一石二鸟”之计,不光宣示了自己的技术能力,还能就此打开一个新的市场。在埋头拉车(进行自动驾驶研发)的同时也抬头看看路(获得ADAS营收)。
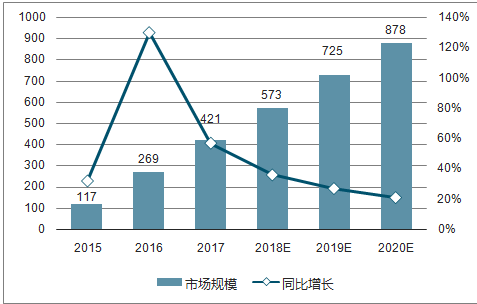
2015-2020年国内ADAS行业规模及预测(亿元)图 公开资料整理
3、形成自动驾驶技术话语权
在学术圈和技术界,都存在话语权的问题。自动驾驶的话语权在于能够形成完善的技术解决方案、能够形成标准的技术规范、能够整合上下游的产业链。掌握了话语权,就能形成自己的技术生态,进而生成马太效应,在行业中形成一定规模的垄断。
百度正在努力建立自己在自动驾驶视觉感知技术方面的话语权,毕竟既有自己成熟的激光雷达方案,又深钻纯视觉方案的自动驾驶研发公司一个手都数的出来,百度提前布局就是为了提前完成技术沉淀,占据先发优势,形成自己在行业的话语权。
总结:技术的发展是永无止境的,激光雷达与纯视觉方案的争论也是技术发展的一部分,我们需要比较技术之间的长板,我们更需要了解技术之间的短板,只有通过争论才会将各自的短板充分暴露,而技术的进步则在于人类对短板修复程度的高低与好坏。
联系人:徐经理
手机:13907330718
电话:0731-22222718
邮箱:hniatcom@163.com
地址: 湖南省株洲市石峰区联诚路79号轨道智谷2号倒班房6楼603室
 湖南智能-MSN
湖南智能-MSN 湖南智能-Skype
湖南智能-Skype
 湖南智能-阿里
湖南智能-阿里